TSI系統概述
汽輪機安全監視及保護系統主要包括監視保護系統(TSI)、危急遮斷系統(ETS)裝置、自動盤車操作裝置。
TSI系統能連續地監測汽輪機的各種重要參數,例如:可對轉速、超速保護、偏心、軸振、蓋(瓦)振、軸位移、脹差、熱膨脹等參數進行監測,幫助運行人員判明機器故障,使得這些故障在引起嚴重損壞前能及時遮斷汽輪發電機組,保證機組安全。
TSI監測信息提供了動平衡和在線診斷數據,維修人員可通過診斷數據的幫助,分析可能的機器故障,幫助提出機器預測維修方案,預測維修信息能推測出旋轉機械的維修需要,使機器維修更有計劃性,減少維修時間,其結果是減少了維修費用,提高了汽輪機組的可用率。
TSI的主要原理及功能
TSI系統主要由傳感器及智能板件組成
傳感器是將機械振動量、位移、轉速轉換為電量的機電轉換裝置。根據傳感器的性能和測試對象的要求,利用電渦流傳感器,對汽輪機組(純電調)的轉速、偏心、軸位移、軸振動、脹差進行測量
利用速度傳感器對蓋振進行測量
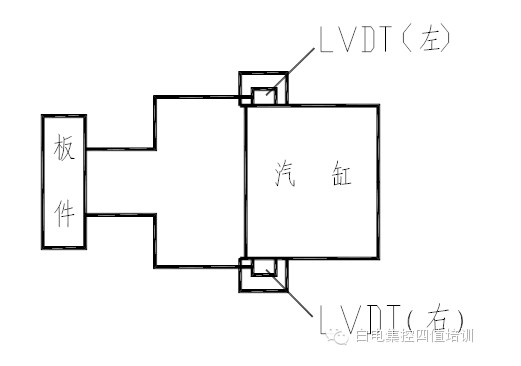
利用線性可變差動變壓器(LVDT)對熱膨脹進行測量
利用差動式磁感應傳感器來測量機組的轉速
電渦流傳感器
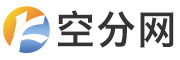
工作原理:通過傳感器端部線圈與被測物體(導電體)間的間隙變化來測物體的振動相對位移量和靜位移的,它與被測物之間沒有直接的機械接觸,具有很寬的使用頻率范圍(從0~10Hz)
傳感器的端部有一線圈,線圈通以頻率較高(一般為1MHz~2MHz)的交變電壓 ,當線圈平面靠近某一導體面時,由于線圈磁通鏈穿過導體,使導體的表面層感應出一渦流ie,而ie所形成的磁通鏈又穿過原線圈,這樣原線圈與渦流“線圈”形成了有一定耦合的互感,最終原線圈反饋一等效電感。而耦合系數的大小又與二者之間的距離及導體的材料有關,當材料給定時,耦合系數K1與距離d有關,K= K1(d),當距離d增加,耦合減弱,K值減小,使等效電感增加,因此,測定等效電感的變化,也就間接測定d的變化。
渦流傳感器原理簡圖
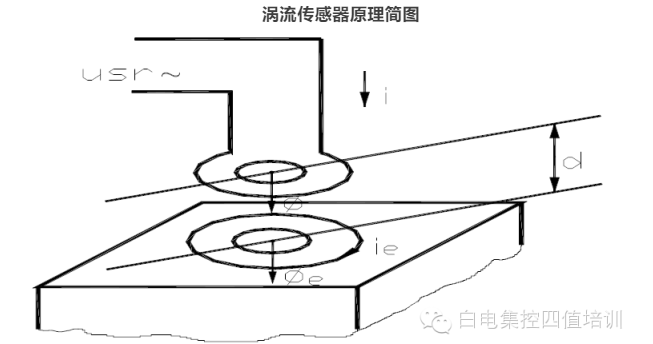
由于傳感器反饋回的電感電壓是有一定頻率(載波頻率)的調幅信號,需檢波后,才能得到間隙隨時間變化的電壓波形。即根據以上原理所述,為實現電渦流位移測量,必須有一個專用的測量路線。這一測量路線(稱之為前置器)應包括具有一定頻率的穩定的震蕩器和一個檢波電路等。渦流傳感器加上一測量線路(前置器),如框圖 所示:從前置器輸出的電壓Vd是正比于間隙d的電壓,它可分兩部分:一為直流電壓Vde,對應于平均間隙(或初始間隙),一為交流電壓Vac,對應于振動間隙。
前置器原理簡圖
 速度傳感器
速度傳感器
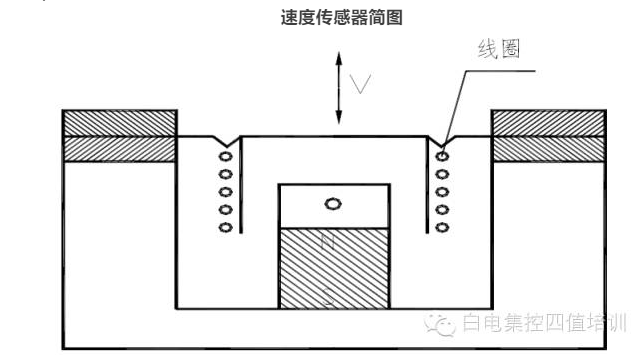
工作原理:基于一個慣性質量和移動殼體,傳感器有一個永久磁鐵,它被固定在傳感器殼體上,圍繞著磁鐵是一個慣性質量線圈,通過彈簧連在殼體上。測量時,將傳感器剛性固定在被測物體上,隨著被測物振動,磁鐵運動,使其產生磁場運動。而線圈因固定在彈簧上,具有較大的慣性質量,即相對高頻振動的物體,其是相對靜止的。這樣,線圈在磁場中作直線運動,產生感應電動勢,其大小與線圈運動的線速度(即:機殼的速度)成正比。通過對感應電動勢的檢測,即能獲得被測物體的線速度。
速度傳感器簡圖
LVDT傳感器
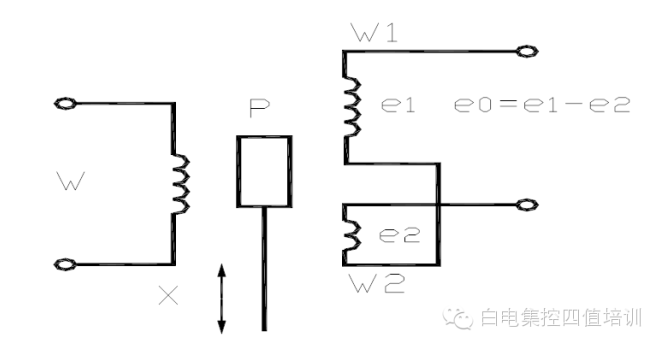
工作原理:利用電磁感應中的互感現象,實質上就是一個變壓器, 變壓器上初級線圈W和兩個參數完全相同的次級線圈W1,W2組成,線圈中心扦入圓柱形鐵心,次級線圈W1和W2反極性串聯,當初級線圈W加上交變電壓時,次級W1和W2分別產生感應電勢e1和e2,其大小與鐵心位置有關。
LVDT原理簡圖
差動式磁感應傳感器
工作原理:利用一個差動式敏感元件。該元件由一塊永久性磁鐵上的兩個相互串聯的磁敏半導體電阻組成(這兩個半導體的材料及幾何尺寸相同)。在傳感器電路中,這兩個電阻組成一個差動電感電橋(如惠斯頓電橋)。當磁鐵或鋼的觸發體接近或遠離傳感器且相互成直角(即傳感器探頭表面磁鐵所產生的磁場與觸發體邊沿成直角)時,它干擾了傳感器內部的磁場,使差動電感電橋失去平衡而輸出一電壓。通過對這一電壓測量,即能獲得被測物(即觸發體)與傳感器探頭間的間隙變化。
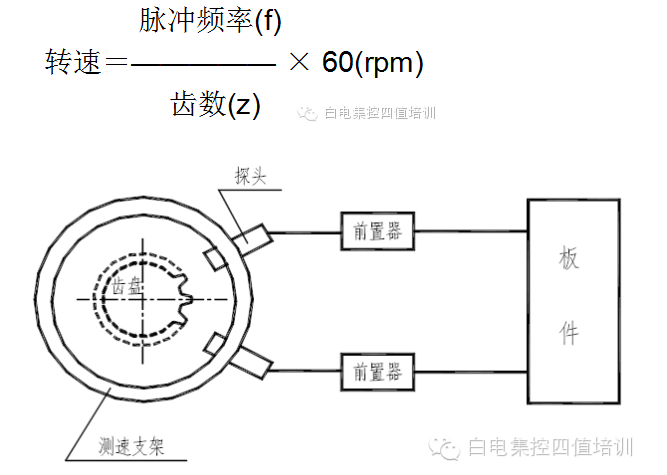
在TSI測量實際應用中,我們一般用該磁感應傳感器測量機組轉速,就是通過測量探頭與測速齒盤輪間的高、低電壓變化所形成脈沖信號的數量,來得到實際轉速值。

智能板件
各種測量板件接受相應傳感器的電量信號后進行整形、計算、邏輯處理等以后,顯示出精確、直觀的監測數據和報警指示。輸出標準的模擬量信號和繼電器接點。智能板件可對傳感器聯線和自身的運行情況進行檢測,具有計算機通訊接口,可對測量范圍和邏輯輸出進行組態,具有緩沖傳感器信號輸出等功能。對于重要的測量可進行冗余的配置,增強了可靠性 。
轉速及零轉速
轉速值顯示是汽輪機組開車、停車以及穩定運行時的重要參數,并且振動值與機器轉速的相關性對最終分析機器性能十分重要。例如:在機器停車過程中,轉速突然下降,會意味著機器內部存在著大面積的金屬摩碰。而零轉速是預先設定的軸旋轉速度,當運行的機器需停車時,機器轉速達到零轉速設置點,繼電器觸點動作,使盤車齒輪嚙合,使軸持續慢速旋轉,來防止軸產生彎曲,以避免在接踵而來的開車中由于軸彎曲對機器造成損壞
測量鏈由兩只裝于前箱正對60(或134)齒盤的傳感器和板件組成, 當機器旋轉時,齒盤的齒頂和齒底經過探頭,探頭將周期地改變輸出信號,即脈沖信號,板件接收到此脈沖信號進行計數、顯示,與設定值比較后,驅動繼電器接點輸出。轉速的測量范圍:0~5000rpm;零轉速設定值:小于4rpm;轉速報警值:3240rpm。
轉速及零轉速測量示意圖
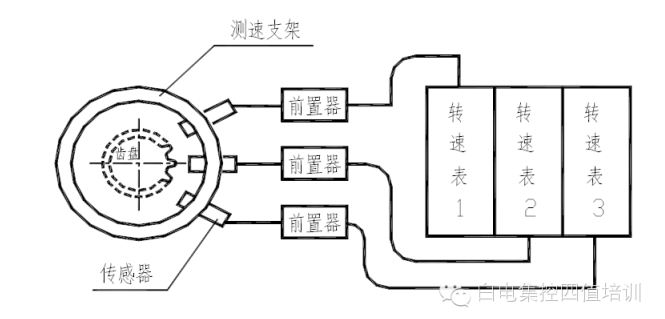
超速保護
超速保護應具有快速響應和錯誤冗余表決邏輯,因此本測量鏈采用“三取二”方式。由三只裝于前箱、正對于60齒盤的渦流傳感器和三塊轉速表組成,設定值為3300rpm。與轉速測量同樣的原理,轉速值=(脈沖頻率/齒數)×60。各機組超速的測量范圍:0~5000rpm。
超速測量示意圖
軸振動
對旋轉機械來說,衡量其全面的機械情況,轉子徑向振動振幅,是一個最基本的指標,很多機械故障,包括轉子不平衡、不對中、軸承磨損、轉子裂紋以及磨擦等都可以根據振動的測量進行探測。轉子是旋轉機械的核心部件,旋轉機械能否正常工作主要決定于轉子能否正常運轉 。
從轉子運動中去監視和發現振動故障,比從軸承座或機殼的振動提取信息更為直接和有效。所以,目前軸振的測量越來越重要,軸振動的測量對機器故障診斷是非常有用的 。
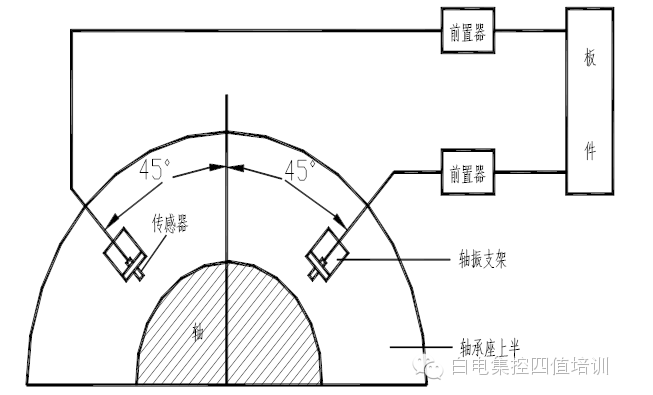
根據振動學原理,由X、Y方向振動合成可得到軸心軌跡。在測量軸振時,常常把渦流探頭裝在軸承殼上,探頭與軸承殼變為一體,因此所測結果是軸相對于軸承殼的振動。由于軸在垂直方向與水平方向并沒有必然的內在聯系,亦即在垂直方向(Y方向)的振動已經很大,而在水平方向(X方向)的振動卻可能是正常的,因此,在垂直與水平方向各裝一個探頭。由于水平中分面對安裝的影響,實際上兩個探頭安裝保證相互垂直即可,如下圖所示。當傳感器端部與轉軸表面間隙變化時的傳感器輸出一交流信號給板件,板件計算出間隙變化(即振動)峰-峰(P-P)值。機組軸振的測量范圍:0~400μm;報警值:125μm;停機值:250μm。
軸振測量示意圖
軸承振動(蓋或瓦振 )
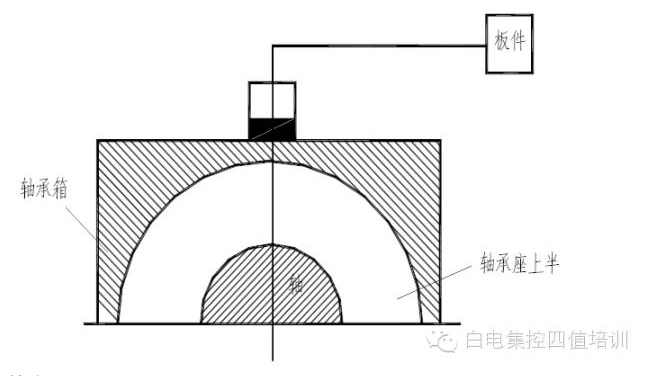
在軸振動的測量中已說明了大軸的振動可以傳遞到軸承殼上,利用速度傳感器測量機殼相對于自由空間的運動速度,板件把從傳感器來的速度信號進行檢波和積分,變成位移值,并計算出相應的峰-峰值位置信號如下圖所示。機組瓦振的測量范圍:0~100μm。
蓋振的測量示意圖
偏心
轉子的偏心位置,也叫做軸的徑向位置,是指轉子在軸承中的徑向平均位置,在轉軸沒有內部和外部負荷的正常運轉情況下,轉軸會在油壓阻尼作用下,在設計確定的位置浮動,然而一旦機器承受一定的外部或內部的預加負荷,軸承內的軸頸就會出現偏心,其大小是由偏心度峰-峰值來表示,即軸彎曲正方向與負方向的極值之差
偏心的測量
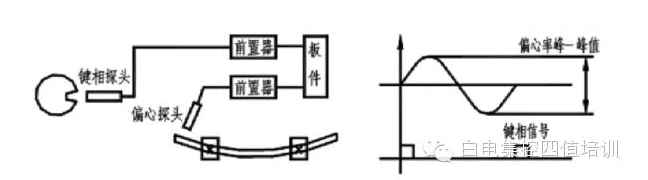
偏心的測量可用來作為軸承磨損,以及預加負荷狀態(如不對中)的一種指示;轉子偏心(在低轉速時的彎曲)測量是在啟動或停機過程中,必不可少的測量項目,它可使你能夠看到由于受熱或重力所引起的軸彎曲的幅度。偏心監測板接受兩個渦流傳感器信號輸入,如下圖所示。一個用于偏心的測量,另一個是鍵相器的測量,它用在峰-峰信號調節電路上。鍵相探頭觀察軸上的一個鍵槽,當軸每轉一轉時,就產生一個脈沖電壓,這個脈沖可用來控制計算峰-峰值。當然,鍵相信號也可用來指示振動的相位,如下圖所示。當知道了測振探頭與鍵相探頭的夾角時,就可找出不平衡質量的位置,即轉子高點的位置。這對軸的平衡是很重要的。機組偏心的測量范圍:0~100μm。報警值:大于原始值的30μm。
偏心測量示意圖
軸位移
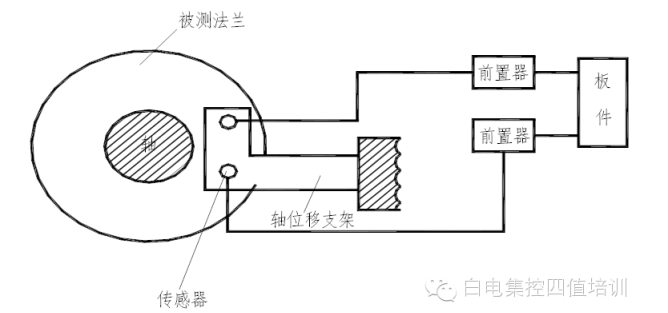
軸在運行中,由于各種因素,諸如載荷、溫度等的變化會使軸在軸向有所移動。這樣轉子和定子之間有可能發生動靜磨擦,所以需用傳感器測量轉子相對于定子軸向位置的變化,即:軸在軸向相對于止推軸承的間隙。
由于所采用的監測器可能把傳感器的失效作為軸向位移故障而發出報警信號,由此可能引起機組誤停機。而根據API670標準要求,用兩個探頭同時探測一個對象,可以免發生誤報警 。
要求兩個探頭的安裝位置離軸上止推法蘭的距離應<305mm,如果過大,由于熱膨脹的影響,所測到的間隙,不能反映軸上法蘭與止推軸承之間的間隙 。
如圖所示,兩個渦流探頭測量轉子的軸向變化,輸出探頭與被測法蘭的間隙成正比的直流電壓值,板件接受此電壓值后,經過計算處理,顯示出位移值。為避免誤報警,停機邏輯輸出為“與”邏輯。機組軸向位移的測量范圍:-2~+2mm。
軸位移測量示意圖
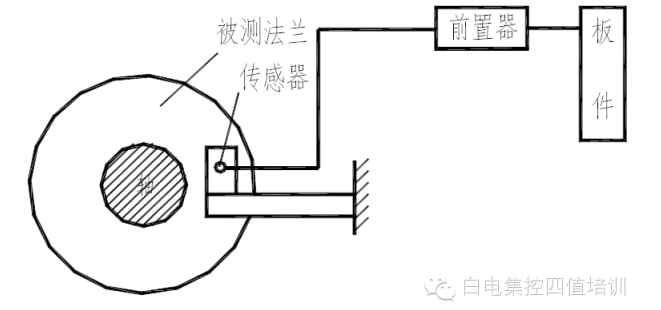
脹差
脹差是轉子和汽缸之間的相對熱增長,當熱增長的差值超過允許間隙時,便可能產生磨擦。在開機和停機過程中,由于轉子與汽缸質量、熱膨脹系數、熱耗散系數的不同,轉子的受熱膨脹和汽缸的膨脹就不相同,實際上,轉子的溫度比汽缸溫度上升得快,其熱增長的差值如果超過允許的動靜間隙公差,就會發生磨擦,從而可能造成事故。所以監視脹差值的目的,就是在產生磨擦之前采取必要的措施來保證機組的安全 。
一般規定轉子膨脹大于汽缸膨脹為正方向,反之為負方向。另外,脹差測量如果范圍較大,已超過探頭的線性范圍時,則可采用斜面式測量和補償式測量方式。由于不可能在汽缸內安裝渦流傳感器,利用滑銷系統,傳感器被固定在軸承箱的平臺上 。
脹差測量示意圖
熱膨脹
汽輪機在開機過程中由于受熱使其汽缸膨脹,如果膨脹不均勻就會使汽缸變斜或翹起,這種變形會使汽缸與基礎之間產生巨大的應力,由此帶來不對中現象,而這種現象,通常是因為滑銷系統“卡澀”所引起的。知道了汽缸膨脹和脹差,就可以確定轉子和汽缸的膨脹率 。
熱膨脹測量示意圖